
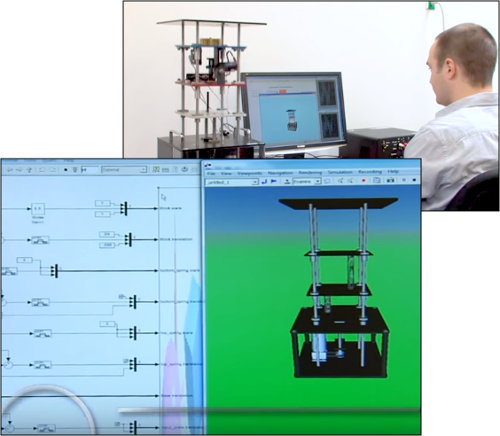
- Permite desarrollar e implementar rápidamente sistemas de control para dispositivos Quanser bajo el entorno de MATLAB/Simulink
- Alta performance en tiempo real sobre objetos tales como QNX
- Permite ajustar los parámetros directemte desde los diagramas de Simulink
- Permite aprovechar las rutinas de ploteo, realidad virtual y otras capacidades avanzadas de Simulink
- Modelos multi-hilo y multi-rate
- Generación de código para múltiples objetivos desde un único diagrama de Simulink
- Ejecución y conexión simultánea de múltiples modelos a un mismo objetivo en tiempo concurrente
- Compilación incremental para grandes sistemas a través de la referencia de modelo
- Permite reconfigurar dinámicamente un sistema en ejecución desde un modelo supervisor de Simulink
- Soporte de hilos asíncronos de procesamiento
- Por favor revise la documentación on-line del desarrollador para asegurarse de que su hardware y software serán compatibles

Presentación de producto